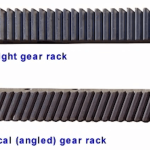
How to choose between Straight Tooth Racks and Helical Tooth Racks?
12 2 月, 2025How to choose between Straight Tooth Racks and Helical Tooth Racks?
12 2 月, 2025Stepper Motors vs. Servo Motors: Key Differences and Applications

Electric motors are indispensable in automation, robotics, and precision control systems. Among the most widely used types are stepper motors and servo motors, each with distinct operating principles, performance characteristics, and ideal use cases. Understanding their differences is critical for selecting the right motor for a specific application.
1. Operating Principle and Control Method
-
Stepper Motor:
A stepper motor operates in discrete "steps" by energizing coils in a sequence. It uses an open-loop control system, meaning it does not require feedback to determine position. Instead, it relies on precise pulse signals from a controller to move incrementally. Each pulse corresponds to a fixed angular rotation (e.g., 1.8° per step for a common 200-step motor).
Key terms: Full-step, half-step, microstepping. -
Servo Motor:
A servo motor employs a closed-loop control system. It integrates a feedback device (e.g., an encoder or resolver) to continuously monitor rotor position, speed, and torque. This feedback allows the controller (often a PID algorithm) to adjust the motor's performance in real time, ensuring accuracy even under variable loads.
Key terms: PID control, encoder resolution, torque control.
2. Performance Characteristics
-
Precision and Speed:
-
Stepper motors excel in low-to-medium speed applications where holding position without feedback is sufficient. However, they may lose synchronization ("lose steps") if overloaded or operated beyond their torque-speed curve.
-
Servo motors maintain high precision at both low and high speeds. Their closed-loop system dynamically corrects errors, making them ideal for high-speed, high-torque, or rapidly changing load conditions.
-
-
Torque Delivery:
-
Stepper motors provide high holding torque at standstill but experience torque drop-off as speed increases.
-
Servo motors deliver consistent torque across their speed range and can handle sudden load changes more effectively.
-
-
Efficiency:
-
Stepper motors draw full current even when stationary, leading to higher energy consumption in static applications.
-
Servo motors adjust power input based on load requirements, improving energy efficiency.
-
3. Complexity and Cost
-
Stepper Motors:
Simpler in design and control due to their open-loop system. They require no feedback components, reducing upfront costs. However, microstepping drivers or additional cooling may be needed for advanced applications.
Typical cost: Lower initial cost, ideal for budget-conscious projects. -
Servo Motors:
More complex, requiring a motor, encoder, and sophisticated controller. The closed-loop system increases component costs and setup complexity.
Typical cost: Higher initial investment but better long-term value for demanding tasks.
4. Applications
-
Stepper Motors:
-
3D printers, CNC machines (for axis control), scanners, and conveyor systems.
-
Applications where position control is critical but speed and dynamic load adjustments are minimal.
-
-
Servo Motors:
-
Industrial robots, CNC spindle control, camera gimbals, and aerospace systems.
-
High-performance tasks requiring rapid acceleration, precise velocity control, or variable loads.
-
5. When to Choose Which Motor?
-
Choose a Stepper Motor if:
-
Your application requires low-to-medium speed operation.
-
Open-loop simplicity and lower cost are priorities.
-
Holding torque at rest is critical (e.g., positioning stages).
-
-
Choose a Servo Motor if:
-
High speed, dynamic response, or variable loads are involved.
-
Energy efficiency and continuous torque are essential.
-
Closed-loop feedback is necessary to prevent positional errors.
-
Conclusion
Stepper and servo motors serve overlapping but distinct roles in motion control. Steppers offer simplicity and cost-effectiveness for predictable, low-speed tasks, while servos provide unmatched precision and adaptability for complex, high-performance systems. The choice ultimately hinges on the application’s speed, torque, accuracy requirements, and budget constraints. Advances in hybrid systems (e.g., closed-loop steppers) are blurring traditional boundaries, but understanding core differences remains vital for optimal design.